Farbe Elektronik - проектирование, разработка и производство микроэлектроники для Интернета Вещей (IoT)

Основные направления
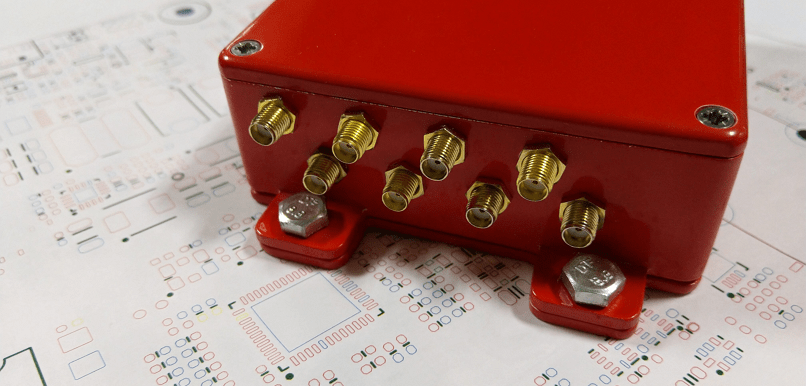
RFID оборудование
Промышленные и настольные RFID-считыватели, моноблоки, антенны
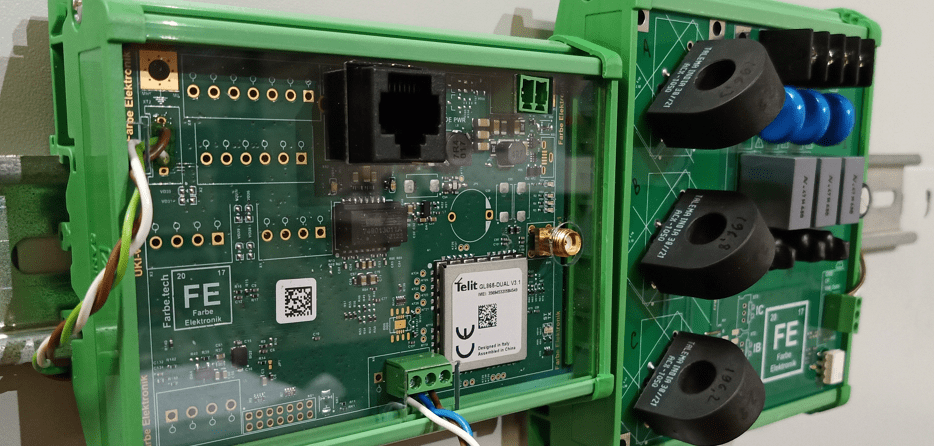
IoT контроллеры
Контроллеры для сбора, хранения и обработки данных с любых датчиков и интерфейсов
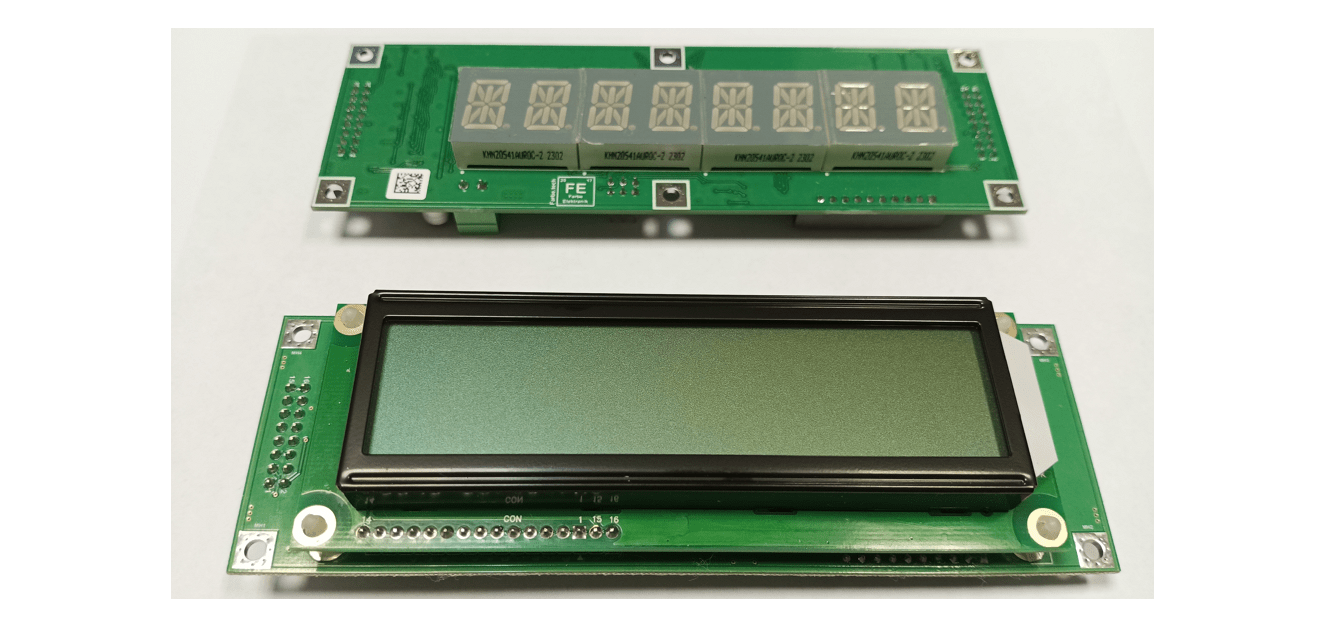
Разработка
Большой опыт в разработке различного оборудования под разные задачи
Рабочие проекты
Печи для пиццы
Мониторинг работы конвейерных печей. Удаленное управление параметрами и настройками в реальном времени. Контроль потребления электроэнергии
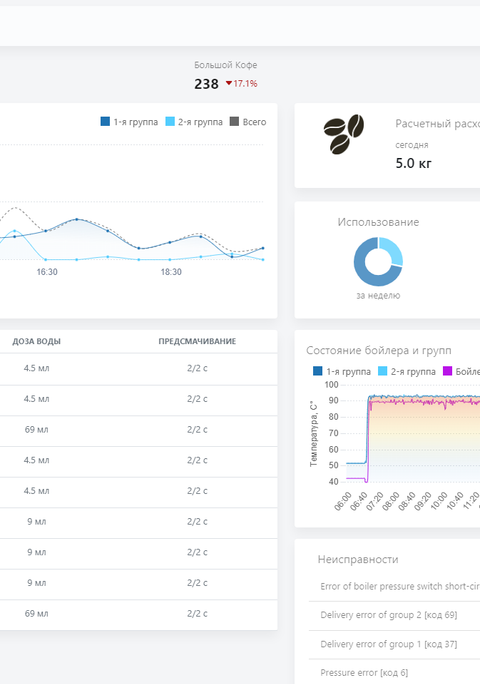
Кофе машины
Контроль за параметрами работы профессиональных кофе машин и соблюдением техпроцессов работы бариста
Холодильное оборудование
Современные холодильники, контролируя температуру, могут знать, какой и сколько продуктов внутри, срок их годности, передают телеметрию и многое другое
Управление отходами
Идентификация мусорных контейнеров позволяет в режиме реального времени контролировать вывоз мусора и оценивать работу логистики по перемещению отходов
Наши преимущества
Собственная разработка
1
Собственная разработка
Мы проектируем и разрабатываем оборудование полностью с нуля. Вся аппаратная архитектура и дизайн находятся под нашим контролем
Собственное ПО
2
Собственное ПО
Программное обеспечение, прошивки для оборудования, собственная IoT-платформа для сбора, хранения и анализа данных
Гибкость
3
Гибкость
Программно-аппаратный комплекс можно адаптировать и настроить под Ваши различные задачи
Платформа
Собственная веб-платформа Farbe.cloud
Для решения конкретной задачи необходимо полностью контролировать и управлять всем парком техники, как локально, так и из любой точки мира. Платформа Farbe Cloud позволяет удаленно собирать, хранить и обрабатывать технические данные, обновлять, управлять и контролировать оборудование. Анализ и аналитика дают дополнительные конкурентные преимущества

О нас

О нас
Farbe Elektronik - компания с опытом
Мы много лет занимаемся разработкой и производством микроэлектроники.
С 2019 года развиваем собственные проекты в сфере IoT (интернет вещей) и RFID (радиочастотной идентификации), имеем экспертизу и серьезный опыт.
С 2019 года развиваем собственные проекты в сфере IoT (интернет вещей) и RFID (радиочастотной идентификации), имеем экспертизу и серьезный опыт.
Наша коммуникабельная и дружески настроенная команда всегда готова помочь вам!




Контакты
Телефон
+7 (495) 545-85-11
+7 (499) 705-72-72
Online
Адрес
Москва, Нагорный проезд 5